La Storia
General Logic nasce nel 1998 per iniziativa di Daniele Lugli e Franco Sartorio.
Daniele Lugli, laureato in Ingegneria Nucleare con una tesi sperimentale svolta all’Euratom, dopo essersi occupato di sistemi esperti diagnostici ha diretto l’ufficio software di Fidia (produttori di controlli numerici per fresatura) e coordinato l’ufficio tecnico di Prima Electronics nello sviluppo del controllo numerico PRIMACH, per robot e macchine di taglio laser.
Franco Sartorio è stato una figura importante dell’imprenditoria piemontese e italiana. Laureato in ingegneria elettrotecnica e meccanica, fondatore di DEA e del Gruppo Prima, titolare di numerosi brevetti meccatronici, è il padre della macchina di misura a contatto.
Le macchine di misura PAG e Sentinel progettate da Sartorio sono rimaste in uso presso centinaia di clienti entusiasti, che non le volevano sostituire neanche quando i ricambi dell’elettronica non erano più disponibili.
La mission originaria di General Logic è stata quindi realizzare un moderno controllo numerico per il retrofit di queste macchine, consentendo il riutilizzo delle vaste librerie di part program create da molti clienti; così è nato VCNC, uno dei primi controlli basati su Personal Computer, e così General Logic ha potuto accumulare una notevole esperienza nel campo della metrologia.

OptiMe
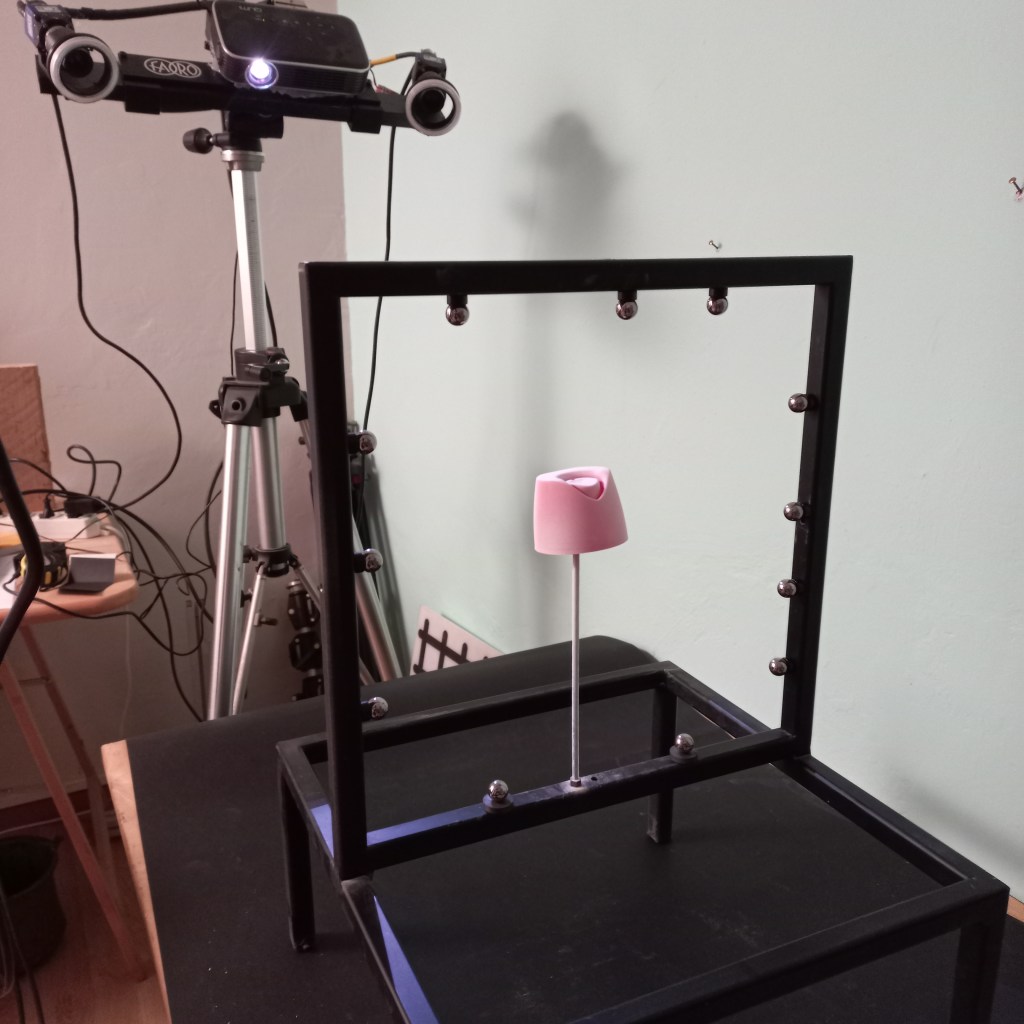
Ben presto General Logic si è resa conto delle potenzialità della misura ottica ed ha iniziato lo sviluppo di OptiMe (Optical Measurement, ma anche benissimo in Latino). Si tratta di uno scanner tridimensionale basato sulla proiezione di una sequenza di pattern di luce strutturata, acquisiti da due telecamere (nel modello denominato Bino) fissate su un supporto rigido.

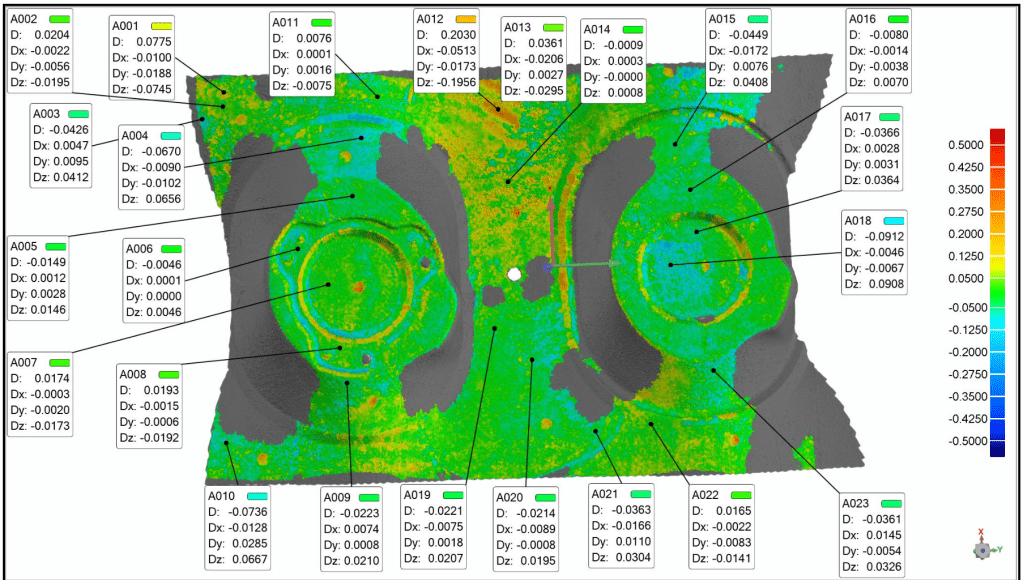
Il confronto con scanner commerciali ha evidenziato risultati pienamente sovrapponibili.
A seconda della configurazione (distanza tra le telecamere e loro orientazione; lunghezza focale degli obiettivi) OptiMe può scansionare oggetti di dimensioni diverse.

Innovazione
OptiMe presenta innovazioni difficili da riscontrare in sistemi simili:

C-OptiMe
Nel 2018 Fratelli Rotondi srl di Legnano, produttori di macchine di misura a contatto e righe ottiche, hanno acquisito una partecipazione in General Logic. Uno dei frutti di questa sinergia è C-OptiMe (Collaborative OptiMe).
Il cobot (collaborative robot) movimenta la testa OptiMe consentendo di effettuare tutte le scansioni necessarie da programma, senza bisogno di muovere manualmente il pezzo. Una tavola rotante può completare il sistema, consentendo l’acquisizione di pezzi anche di dimensione superiore al campo di lavoro del cobot.
OptiMe Trio
L’utilizzo di tre telecamere, invece di due come nel modello Bino, consente alcune ulteriori possibilità. Se in Bino è necessario proiettare una sequenza di pattern per rendere identificabili i punti sulla superficie, e quindi effettuarne la ricostruzione, la terza telecamera consente l’identificazione e la ricostruzione anche con un solo pattern random proiettato. Questo significa ridurre i tempi di scansione e il rischio che l’oggetto si muova durante l’acquisizione. Per questo motivo General Logic e Fratelli Rotondi stanno sviluppando Trio, il nuovo modello trinoculare di OptiMe.

Un’altra possibilità offerta dal sistema trinoculare è quella di rilevare i bordi di oggetti piatti comunque orientati, mentre un sistema binoculare non può acquisire correttamente bordi paralleli alla congiungente le due telecamere.